|
|
 Mekanika Terapan
03 Desember 2009
Mekanik pada sistem Variable Speed Drive (VSD) Seri 1 Dalam applikasi Motor dan Variable Speed Drive (VSD) selalu dijumpai ada komponen mekanik yang terkait erat dengan sistem tersebut. Untuk memilih motor dan VSD yang tepat ada baiknya para praktisi juga membekali diri dengan sedikit pengetahuan mekanik terapan. 1.1 Dasar-dasar mekanik 1.1.1 Gaya Satuan gaya dalam
Suatu benda akan tetap berada dalam keadaan diam atau akan terus bergerak dengan kecepatan tetap, kecuali ada gaya gaya lain yang bekerja padanya. Hukum pertama ini menyatakan juga kita harus memberikan gaya pada benda itu terlebih dahulu supaya benda tersebut dapat bergerak dari keadaan diam, atau memberi gaya supaya benda itu dapat berubah arah geraknya ataupun merubah kecepatannya.
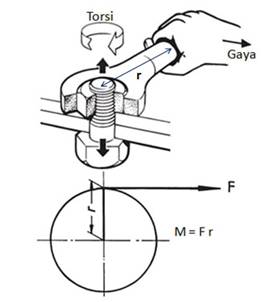
1.1.2 Torsi Torsi adalah perkalian antara gaya F dengan lengan gaya r. Satuan Torsi adalah Nm.
Gambar 1 memberikan ilustrasi yang jelas tentang torsi.
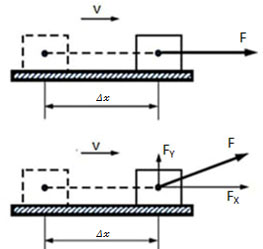
1.1.3 Usaha Gaya yang menyebabkan sebuah benda bergerak, melakukan sejumlah usaha. Usaha yang dilakukan adalah hasil perkalian gaya dengan jarak perpindahan dalam arah gaya. Satuan usaha adalah Nm atau J (Joule).
Gambar 2: Benda bergerak sejauh 1.1.4 Daya = Power Dalam usaha kita tidak melihat adanya unsur waktu. Kita tidak tahu berapa lama usaha tersebut berlangsung, lama atau singkat ? Namun adalah penting untuk mengetahui kecepatan gaya melakukan usaha. Sehingga kita perlu tahu daya atau power. Jadi daya adalah kemampuan melakukan suatu usaha dalam satu satuan waktu. Satuan untuk daya adalah
1.1.5 Effisiensi Effisiensi tidak mempunyai satuan. Sering kali effisiensi dinyatakan dengan persentase (%). Dalam praktek nya selalu daya output atau daya mekanik yang tersedia selalu lebih kecil dari daya yang kita masukkan. Kita sebut sistem tersebut mengalami kerugian daya. Rugi daya ini disebut dengan daya kerugian atau disingkat dengan Rugi daya dapat terjadi karena bermacam alasan seperti antara lain: · gesekan (friction loses) · kerugian arus eddy · kerugian hysteresis · kerugian tembaga · dan lain lain. Perbandingan antara daya output terhadap daya input disebut dengan effisiensi Makin tinggi
1.2 Gerakan Linear dan Gerakan Anguler 1.2.1 Gerakan Linear Suatu benda dikatakan bergerak jika benda itu sudah mengalami perpindahan tempat terhadap titik acuan tertentu. Jarak pindah benda tersebut terhadap titik acuan kita sebut dengan jarak tempuh Perubahan kecepatan terhadap satu satuan waktu kita sebut dengan percepatan atau aselerasi Dari mekanika dasar kita mengetahui beberapa persamaan seperti ini:
Satuan percepatan linear Satuan kecepatan linear Satuan jarak tempuh linear
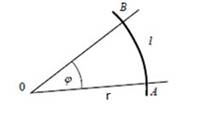
Gambar 3: Radial dan Sudut
Untuk satu lingkaran, nilai Sehingga:
Gambar 4: Kecepatan Anguler
Satuan percepatan anguler atau percepatan sudut Satuan kecepatan anguler atau kecepatan sudut Satuan jarak anguler
maka:
Jika untuk waktu t maka:
Untuk pemakaian di motor, satu periode terjadi jika sumbu motor sudah berputar satu kali putaran. Sehingga dapat kita tampilkan persamaan diatas dengan persamaan yang telah kita kenal baik, yaitu: Percepatan merupakan besaran yang sangat penting karena sangat mempengaruhi mekanik sistem. Pemilihan motor berlandaskan besaran percepatan ini. Misalnya kita selalu menghitung daya maksimum motor dengan mengambil data data saat aselerasi dan deselerasi. Selain itu ada besaran lainnya lagi yang sering dipakai, yaitu
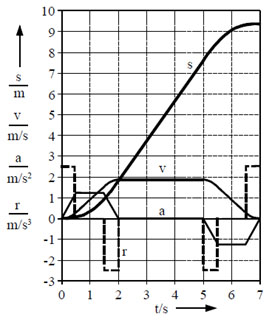
Hal yang sama juga dapat dipakai di gerakan anguler. Jerk biasanya dipakai pada alat pengangkut atau Lift penumpang. Jerk yang lebih besar dari
Gambar 5: Diagram waktu dari Jarak, Kecepatan, Aselerasi dan Jerk
Motor bertujuan: Merubah energi listrik menjadi energi mekanik dengan effisiensi yang tinggi Menghasilkan gaya, torsi sesuai dengan kebutuhan proses Dengan mensubstitusikan definisi kecepatan linear ke persamaan usaha yang telah dibahas diatas:
dan
diperoleh:
Poris sebuah motor listrik memberikan kecepatan anguler sebagai outputnya. Untuk mempergunakan kecepatan ini pada mesin kita harus mengkonversikan kecepatan anguler ini menjadi kecepatan translasi. Disini berlaku:
Dengan maka:
Dengan menggabungkan persamaan diatas, maka:
Jika Torsi dinyatakan dengan Nm, Kecepatan dinyatakan dengan satuan rotasi per menit (rpm) dan Daya dalam satuan kW, maka kita mendapatkan suatu persamaan yang sudah sangat dikenal para parktisi lapangan, yaitu:
Dalam prakteknya kita harus mengkonversikan gerakan rotasi yang tersedia pada poros motor. Konversi ini dapat merupakan perubahan dari gerakan rotasi menjadi gerakan translasi, merubah arah putaran baik selaras dengan poros motor maupun membentuk sudut umpamanya
Ada banyak cara untuk mengkonversi kecepatan rotasi menjadi kecepatan translasi. Beberapa methode diantaranya adalah dengan mempergunakan: 1.4.1 Pinion dan Rak Pinion dan Rak merupakan cara paling murah untuk mengubah gerak rotasi menjadi gerak translasi. Tiap gigi pada pinion berpasangan dengan gigi pada rak.
Gambar 6: Pinion dan Rak (Sumber: Google)
1.4.2 Ballscrew Tiap rotasi dari spindle ballscrew menghasilkan jarak sebesar pitch pada ballscrew. Biasanya dipakai untuk beban yang lebih berat dan kecepatan yang tinggi.
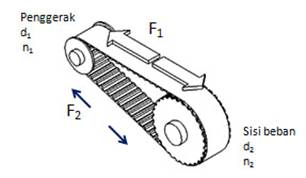
Gambar 7: Ball screw (Sumber: Google) 1.4.3 Pulley dan timing belt Perubahan dari gerak rotasi pada sumbu motor listrik menjadi gerak translasi atau gerak linear dilakukan melalui pulley, baik merupakan pulley satu tahap ataupun pulley bertingkat. Melalui pulley kita juga dapat memindahkan daya dari poros yang satu ke poros yang lain.
Gambar 8: Pulley pada saat bekerja
Perbandingan diameter ini diberi notasi
Jika pulley dalam keadaan diam, kedua gaya sama besar Apabila daya sedang dipindahkan tarikan daya menjadi tidak sama besar. Umpamanya jika daya dari penggerak (sisi motor) dipindahkan ke sisi beban, maka
Torsi didapat dari:
Gear Gear kadang kala disebut dengan gear box. Gear berfungsi untuk merubah kecepatan pada sumbu rotasi , menaikkan / menurunkan torsi, merubah arah putaran dan juga dapat merubah gerak rotasi menjadi gerak translasi. Uraian kita dibawah tidak membahas faktor effisiensi, slip, hysteresis, backlash pada sistem transmisi ini. 1.4.4 Gear Reducer Gear reducer gunanya untuk menurunkan kecepatan dan pada saat yang sama menaikkan torsi pada sumbu putaran sesuai dengan nilai gear ratio. Motor listrik biasanya mempunyai kecepatan yang terlalu tinggi untuk applikasi tertentu. Daya motor nya cukup, namun torsi nya masih terlalu rendah. Dengan penggunaan Gear Reducer maka kecepatan dapat diturunkan sesuai dengan nilai gear ratio dan pada saat yang sama kita menaikkan torsi pada sumbu output dari gear reducer. Pemindahan daya terjadi melalui roda gigi. Perbandingan jumlah gigi merupakan faktor pengurangan kecepatan dan sekaligus faktor untuk menaikkan torsi output. Perbandingan ini disebut gear ratio Pada gear reducer berlaku:
Pada gear reducer juga berlaku:
Tergantung dari konstruksinya, ada berbagai jenis gear reducer, antara lain seperti helical gear, worm gear, planetary gear dan lain lain. 1.4.5 Helical Gear Helical gear mempunyai gear ratio yang terbatas. Effisiensi yang tinggi dibandingkan dengan worm maupun planetary gearbox.
Gambar 9: Konsep Helical Gear Sayatan memperlihatkan bahwa isi dalam dari gear reducer ini yang helical.
Gambar 10: Helical Gear (Sumber: Google) 1.4.6 Worm Gear Konsep Worm Gear Worm Gear dapat mencapai gear ratio yang sangat tinggi, umpamanya sampai 500 : 1 Worm dapat dengan sangat mudah menggerakkan gear, namun Gear tidak dapat menggerakkan Worm. Hal ini disebabkan karena sudut pada Worm sedemikian dangkal sehingga jika Gear mencoba menggerakkan Worm, gaya gesekan yang ada menahan Worm pada tempatnya dan berfungsi sebagai “rem”. Kita sebut terkunci sendiri (self Locking). Sifat seperti ini sangat berguna dan sering digunakan pada sistem Conveyor. Fitur “brake” ini dapat menahan conveyor pada tempatnya jika motor tidak sedang beroperasi.
Gambar 11: Konsep Worm Gear (Sumber: Google) Sebuah Worm Gear yang dipakai di industri diperlihatkan pada gambar 12. Sayatan memperlihatkan Gear dan Worm.
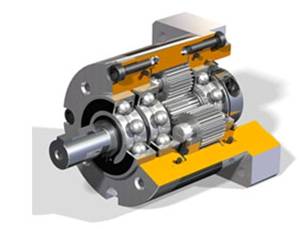
Gambar 12: Worm Gear (Sumber: Motovario) 1.4.7 Planetary Gear Seperti namanya, planetary gear mempunyai susunan gear seperti matahari dan planet planet nya.
Gambar 13: Planetary Gear Planetary gearbox mengkombinasi torsi tinggi dengan dimensi yang kecil. Gear jenis ini mempunyai effisiensi yang tinggi. Sangat cocok untuk applikasi untuk kecepatan yang rendah. Torsi pada Planetary gearbox terdistribusi merata, yaitu pada masing masing gear dalam system planetary tersebut.
Gambar 14: Planetary Gearbox (Sumber: Google) Apakah beban dalam kategori normal load, shocked load dibawah 125% atau shocked load diatas 125% ? Apakah jalan sepanjang hari ? Untuk itu ada faktor yang dipertimbangkan. Kita sebut faktor ini dengan service factor. Jakarta, 2 Desember 2009 Oleh: Amir Kasan Dipl. Ing. Penulis telah berkecimpung dalam dunia Drive & Automation lebih dari dua dasa warsa pada beberapa MNC. Saat ini menjabat sebagi Advisor pada PT. YESS. PT. Yuda Esa Sempurna Sejahtera (PT.YESS) adalah sebuah perusahaan yang bergerak di bidang Motion Controller dan Automation. Kami melakukan pengadaan peralatan seperti Frequensi Inverter, DC-Converter, Servodriver, Motor Induksi, Motor DC, Motor Servo, Motor Stepper serta peralatan Automasi seperti PLC dan HMI dan mesin mesin pengerjaan logam seperti mesin Lathe dan mesin Milling.. Kami juga melakukan rancang bangun (engineering) dan uji coba (testing and commissioning) di lapangan serta jasa pelayanan purna jual.
|
| Copyright ©yudaesa.com, 2009 - 2025. All Rights Reserved Powered by |